Régulateur PID
Un régulateur Proportionnel Intégral Dérivé est un organe de contrôle permettant d'effectuer une régulation en boucle fermée d'un dispositif industriel.

Catégories :
Automatisme - Automatique - Robotique
Recherche sur Google Images :
Source image : forums.futura-sciences.com Cette image est un résultat de recherche de Google Image. Elle est peut-être réduite par rapport à l'originale et/ou protégée par des droits d'auteur. |
Page(s) en rapport avec ce sujet :
- de spécifier indépendamment les temps de montée et le dépassement sur la consigne... (Le régulateur PID est un cas spécifique de RST avec R = T)... (source : adaptech)
- La boucle de régulation avec régulateur PID est une plaque qui fait partie... de la régulation, écart de réglage, atténuation, temps de montée et temps d'... (source : lucas-nuelle)
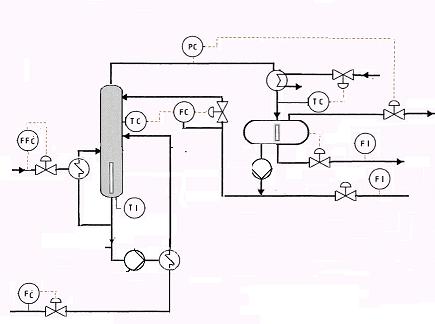
Un régulateur Proportionnel Intégral Dérivé (PID) est un organe de contrôle permettant d'effectuer une régulation en boucle fermée d'un dispositif industriel (voir automatique). C'est le régulateur le plus utilisé dans l'industrie, et il sert à contrôler la plupart de procédés.
Principe général
L'erreur observée est la différence entre la consigne et la mesure. Le PID permet 3 actions simultanées selon cette erreur :
- Une action Proportionnelle : l'erreur est multipliée par un gain Gr
- Une action Intégrale : l'erreur est intégrée sur un intervalle de temps Ti
- Une action Dérivée : l'erreur est dérivée suivant un temps Td
Il existe plusieurs architectures envisageables pour combiner les 3 effets (série, parallèle ou mixte), on présente ici une architecture parallèle ici :

La fonction de transfert avec la transformée de Laplace du régulateur PID parallèle est la somme des 3 actions :

Les différents paramètres à trouver sont Gr, Td et Ti pour réguler le procédé ayant pour fonction de transfert H (s) . Il existe de nombreuses méthodes pour trouver ces paramètres. Cette recherche de paramètre est couramment nommée synthèse. La procédure expérimentale pour calculer ces paramètres se nomme aussi procédure d'identification paramétrique.
La fonction de transfert du contrôleur PID parfaite est irréalisable car l'ordre du numérateur est supérieur à l'ordre du dénominateur. Dans la réalité, on rajoute toujours un paramètre alpha sur l'action dérivée de façon à obtenir un ordre 2 au numérateur et au dénominateur :
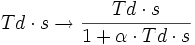 avec α < < 1 On obtient alors une nouvelle fonction de transfert réalisable pour notre régulateur :
avec α < < 1 On obtient alors une nouvelle fonction de transfert réalisable pour notre régulateur :

Néanmoins, pour limiter les effets néfastes du bruit du signal de mesure sur le signal de commande u, on modère l'effet de l'action dérivée dans les régulateurs industriels en adoptant le plus souvent alpha :  .
.
Il est a noter que U (s) = C (s) * E (s)
Réglage d'un PID
Le réglage d'un PID consiste à déterminer les cœfficients Gr, Td et Ti afin d'obtenir une réponse correcte du procédé et de la régulation. L'objectif est d'être robuste, rapide et précis. Il faut pour cela limiter l'ou les éventuels dépassements (overshoot).
- La robustesse est probablement le paramètre principal et délicat. On dit qu'un dispositif est robuste si la régulation fonctionne toujours même si le modèle change légèrement. A titre d'exemple, les fonctions de transfert de certains procédés peuvent fluctuer selon la température ambiante ou de l'hygrométrie ambiante assez à la loi de Pascal. Un régulateur doit être capable d'assurer sa tâche même avec ces changements pour s'adapter à des usages non prévus/testés (dérive de production, vieillisement mécanique, environnements extrêmes... ).
- La rapidité du régulateur dépend du temps de montée et du temps d'établissement du régime stationnaire.
- Le critère de précision est basé sur l'erreur statique.
La réponse type d'un procédé stable est la suivante :

Les paramètres du PID influencent la réponse du dispositif de la manière suivante :
- Gr : Quand Gr augmente, le temps de montée (rise time) est plus court mais il y a un dépassement plus important. Le temps d'établissement fluctue peu et l'erreur statique se trouve perfectionnée.
- Ti : Quand
 augmente, le temps de montée est plus court mais il y a un dépassement plus important. Le temps d'établissement au régime stationnaire s'allonge mais dans ce cas on assure une erreur statique nulle.
augmente, le temps de montée est plus court mais il y a un dépassement plus important. Le temps d'établissement au régime stationnaire s'allonge mais dans ce cas on assure une erreur statique nulle. - Td : Quand Td augmente, le temps de montée change peu mais le dépassement diminue. Le temps d'établissement au régime stationnaire est meilleur. Pas d'influences sur l'erreur statique.
L'analyse du dispositif avec un PID est particulièrement simple mais sa conception peut être délicate, ou alors complexe, car il n'existe pas de méthode unique pour résoudre ce problème. Il faut trouver des compromis, le régulateur parfait n'existe pas. Généralement on se fixe un cahier des charges à respecter sur la robustesse, le dépassement et le temps d'établissement du régime stationnaire.
Les méthodes de réglage les plus utilisées sont la méthode de Ziegler-Nichols, la méthode de P. Naslin (polynômes normaux à amortissement réglable), la méthode du lieu de Nyquist inverse (utilise le diagramme de Nyquist).
Dans à peu près 15% des cas les performances d'un PID peuvent devenir insuffisantes à cause de la présence d'un retard trop important dans le modèle du procédé, on fait alors appel à d'autres algorithmes de réglage (surtout : régulateur PIR ou à modèle interne ou à retour d'état).
Voir aussi
Liens externes
Recherche sur Amazone (livres) : |
Voir la liste des contributeurs.
La version présentée ici à été extraite depuis cette source le 14/04/2009.
Ce texte est disponible sous les termes de la licence de documentation libre GNU (GFDL).
La liste des définitions proposées en tête de page est une sélection parmi les résultats obtenus à l'aide de la commande "define:" de Google.
Cette page fait partie du projet Wikibis.
 Accueil
Accueil Recherche
Recherche Début page
Début page Contact
Contact Imprimer
Imprimer Accessibilité
Accessibilité