Représentation d'état
En automatique, une représentation d'état sert à modéliser un dispositif dynamique sous forme matricielle en utilisant des variables d'état.

Catégories :
Automatique - Robotique
Recherche sur Google Images :

Source image : www.chapitre.com Cette image est un résultat de recherche de Google Image. Elle est peut-être réduite par rapport à l'originale et/ou protégée par des droits d'auteur. |
Page(s) en rapport avec ce sujet :
- La représentation d'état est un autre mode de modélisation moins compact qui..... -Conditions d'extension des paramètres Sij aux systèmes de ... (source : enseirb)
- Ce pendule de torsion est lié à deux systèmes d'amortissement visqueux de constantes C...... Ainsi la nouvelle représentation d'état est :... (source : hal.archives-ouvertes)
En automatique, une représentation d'état sert à modéliser un dispositif dynamique sous forme matricielle en utilisant des variables d'état. On se place alors dans un espace d'état. Cette représentation, qui peut être linéaire ou non-linéaire, doit rendre compte de l'état du dispositif à n'importe quel instant futur si on possède les valeurs initiales. Cette représentation peut être continue ou discrète.
Variables d'état
Un dispositif peut être entièrement décrit avec un ensemble de variables minimal. Les variables d'état sont des grandeurs physiques continues du dispositif (elles doivent être dérivables) et doivent être indépendantes les unes des autres. Elles sont le plus souvent rassemblée dans un vecteur X. La connaissance de l'ensemble des variables d'état à un instant t doit permettre de connaître l'ensemble des valeurs du dispositif à un instant t+dt. Attention, cette représentation n'est pas unique, un même dispositif peut être décrit avec des variables d'état différentes mais leur nombre est toujours le même. Ce nombre, désigné par la lettre n, représente l'ordre du dispositif.
Dispositifs linéaires
La représentation d'état la plus générale pour les dispositifs linéaires est la suivante en continue :


 : vecteur qui représente les n variables d'état
: vecteur qui représente les n variables d'état
 : vecteur qui représente les q mesures
: vecteur qui représente les q mesures
 : vecteur qui représente les p commandes
: vecteur qui représente les p commandes
 : Matrice de dynamique
: Matrice de dynamique
 : Matrice de commande
: Matrice de commande
 : Matrice d'observation
: Matrice d'observation
 : Matrice d'action directe
: Matrice d'action directe
Ceci est le cas le plus général. Les matrices A, B, C, D sont fréquemment invariantes selon le temps, elles deviennent alors des matrices constantes et on parle de représentation d'état continue indépendante du temps.
Cette représentation d'état se représente sous forme de schéma-bloc :

Les valeurs propres de la matrices d'état A représentent les pôles du dispositif si ces valeurs propres ne représentent pas des modes cachés du dispositif c'est-à-dire si les valeurs propres sont observables ET gouvernables/commandables. Si ces pôles sont à partie réelles négatives, alors le dispositif est asymptotiquement stable.
L'état du dispositif est un résumé exhaustif du passé du dispositif. En effet, connaissant l'état x (ti) , et la commande u (t) sur l'intervalle fini [ti;tf], on peut exprimer l'état x (tf) , grâce aux calculs sur l'exponentielle d'une matrice :

Multiplicité de la représentation d'état
Un dispositif donné admet une illimitété de formes d'état strictement équivalentes. En effet, considérons le changement de variable z = Px, avec  et inversible. Le dispositif se réécrit par conséquent comme suit :
et inversible. Le dispositif se réécrit par conséquent comme suit :

Commandabilité et Observabilité
On ne détaillera ici que le cas des dispositifs linéaires invariant (SLI). La commandabilité et l'observabilité dans les cas instationnaires et/ou non linéaires sont bien plus complexes à traiter, et il existe des ouvrages spécialisés dans ce domaine. La commandabilité et l'observabilité sont des propriétés structurelles du dispositif qui n'apparaissent pas dans la représentation par fonction de transfert.
Commandabilité
Un dispositif est dit commandable si quel que soit l'état à l'instant d'origine x (ti) , il existe une commande u (t) , appliquée sur un intervalle de temps fini [ti;tf], telle que x (tf) = 0.
Un critère algébrique existe pour la commandabilité, il est dû à Rudolf Kalman et Richard Bucy (1961). Un dispositif est dit commandable si et uniquement si :

Cette matrice est couramment nommée matrice de commandabilité et ses colonnes se calculent de façon itérative : Ak + 1B = A * AkB
(le rang d'une matrice est le nombre maximal de vecteurs lignes (ou colonnes) linéairement indépendants)
Observabilité
Un dispositif est dit observable si l'observation de ses entrées et sorties pendant un intervalle de temps fini [ti;tf] sert à retrouver l'état d'origine x (ti) . En réalité, dans la mesure où il est envisageable pour les SLI d'avoir une solution analytique, l'observabilité nous permet par conséquent de connaître l'état x (t) à tout instant compris dans l'intervalle [ti;tf]. De manière duale, Kalman et Bucy ont proposé un critère algébrique pour la commandabilité. Une représentation d'état continue indépendante du temps est observable si et uniquement si :
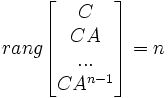
Cette matrice est couramment nommée matrice d'observabilité et ses lignes se calculent de façon itérative : CAk + 1 = CAk * A
Remarques
- Un dispositif à la fois commandable et observable est dit minimal.
- Les propriétés de commandabilité et d'observabilité sont dites duales.
- Les propriétés de commandabilité et d'observabilité sont des propriétés structurelles fortes sur le dispositif. Il existe aussi des extensions plus faibles.
- Voir : Commandabilité et Observabilité.
Cas des dispositifs sous forme de fonction de transfert
Comme dit ci-dessus, les propriétés de commandabilité et d'observabilité ne sont pas apparentes sur les représentations par fonction de transfert. Voici un exemple illustratif.
Considérons les dispositifs S1 et S2 correspondants aux équations différentielles suivantes :


Le dispositif S1 possède la forme d'état triviale suivante :
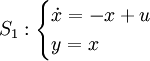
On remarque trivialement que le dispositif est sous forme minimale.
Le dispositif S2 est un peu plus complexe à exprimer sous forme d'état :
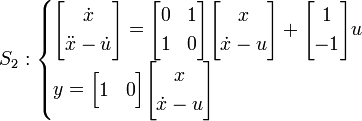
On peut alors calculer la matrice de commandabilité  :
:
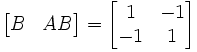
On remarque que le rang de cette matrice est identique à 1 tandis que le dispositif est d'ordre n = 2, le dispositif n'est par conséquent pas commandable.
Malgré tout cela, on peut noter que les deux dispositifs ont la "même" représentation sous forme de fonction de transfert (avec s la variable de Laplace), tandis qu'ils sont principalement différents :
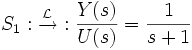

En réalité, ce sont les simplifications des pôles et zéros non commandables, qui fait que la représentation sous forme de fonction de transfert n'est pas adaptée pour refléter l'ensemble des propriétés structurelles du dispositif.
Passage Représentation d'état-Fonction de transfert
Une représentation d'état linéaire continue indépendante du temps peut être transformée en fonction de transfert. Chacune de ces deux représentations dynamiques contient les mêmes informations sur le dispositif. Soit la représentation d'état suivante :

Après un passage en transformée de Laplace (à conditions initiales nulles) :
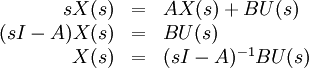
on substitue alors X (s) dans l'équation de sortie :

G (s) représente la fonction de transfert du dispositif :

La fonction de transfert G (s) doit avoir une dimension  , et ainsi un total de qp éléments. On obtient par conséquent k fonctions de transfert différentes, une pour chaque couple entrée/sortie. On comprend facilement que la représentation d'état est plus simple à manipuler quand il y a plusieurs sorties.
, et ainsi un total de qp éléments. On obtient par conséquent k fonctions de transfert différentes, une pour chaque couple entrée/sortie. On comprend facilement que la représentation d'état est plus simple à manipuler quand il y a plusieurs sorties.
Représentation discrète
Pour passer d'un espace continu à un espace discret de période d'échantillonnage Δ il suffit de faire une approximation de la dérivée. Il existe plusieurs méthodes dont l'approximation de Padé. Généralement, on utilise toujours 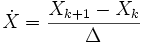 . On représente le dispositif de la manière suivante (l'indice k représente l'échantillonnage) :
. On représente le dispositif de la manière suivante (l'indice k représente l'échantillonnage) :


Pour qu'un dispositif reste observable et commandable par discrétisation, il faut que les valeurs propres λi de la matrice d'état A du dispositif continue vérifie la condition :

Les valeurs propres de la matrices d'état A représentent les pôles du dispositif. Si ces pôles possèdent un module inférieur à 1, alors le dispositif est asymptotiquement stable.
Dispositifs non linéaires
La forme la plus générale d'une représentation d'état se compose de deux fonctions :
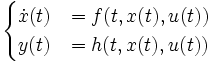
x est toujours nommé le vecteur d'état, y vecteur de sortie et u vecteur d'entré. x évolue le plus souvent dans un sous espace J de  .
.
La première équation représente l'équation d'évolution et la seconde l'équation d'observation. La représentation d'état linéaire décrite préalablement est un cas spécifique de cette forme si les fonctions f et h sont linéaires (on représente alors les fonctions sous forme matricielle).
Multiplicité de la représentation d'état
De la même façon que pour la représentation d'état des dispositifs linéaires, la représentation d'état des dispositifs non linéaires n'est pas unique. En effet, considérons le changement de variable :
 , avec
, avec  un difféomorphisme de dans
un difféomorphisme de dans On remarque :
 , qu'on note
, qu'on note  ensuite.
ensuite. d'où :
On peut alors récrire notre dispositif en tenant compte du changement d'état :
Exemple du pendule
L'exemple classique de dispositif non linéaire est un pendule libre (il n'y a pas d'entrées, le pendule est livré à lui-même). L'équation différentielle régissant le pendule est la suivante :

où :
- θ (t) est l'angle du pendule
- m est la masse du pendule (la masse de la tige est négligée)
- g est l'accélération gravitationnelle
- k est le cœfficient de frottement au point de pivot
- l est le rayon du pendule (jusqu'au centre de gravité de la masse m)
Les équations d'état sont :


où :
- x1 (t) = θ (t) est l'angle du pendule
 est la vitesse angulaire du pendule
est la vitesse angulaire du pendule est l'accélération angulaire du pendule
est l'accélération angulaire du pendule
L'équation d'état peut être rédigée ainsi :

Les points d'équilibre stationnaires d'un dispositif sont définis par les points où  . Dans ce cas, les points qui satisfont ce critère pour le pendule sont :
. Dans ce cas, les points qui satisfont ce critère pour le pendule sont :
pour tout n entier.
Voir aussi
Recherche sur Amazone (livres) : |
Voir la liste des contributeurs.
La version présentée ici à été extraite depuis cette source le 14/04/2009.
Ce texte est disponible sous les termes de la licence de documentation libre GNU (GFDL).
La liste des définitions proposées en tête de page est une sélection parmi les résultats obtenus à l'aide de la commande "define:" de Google.
Cette page fait partie du projet Wikibis.
 Accueil
Accueil Recherche
Recherche Début page
Début page Contact
Contact Imprimer
Imprimer Accessibilité
Accessibilité